PROGRAMMING
Autonomous • Vision • TeleOp
Our software stack is built for reliability under match chaos: reactive pathing, vision alignment, driver assists, and recovery logic.
AUTONOMOUS CORE
Advanced Auto Programming — Pedro Pathing
The lifeline of our autonomous period.
We use Pedro Pathing — a reactive Bézier curve follower with ~1500 recalculations per second and 8 PIDF loops.
Instead of blindly following a fixed route, our robot actively adjusts its motion as it moves.
We switched to Pedro Pathing from RoadRunner to improve real-world stability and correction.
(Note: the underlying Bézier/equation math is handled by the pathing system — we focus on implementation + tuning.)
Highlight: 12-artifact autonomous routine and multi-stage scoring paths using Pedro Pathing.
COMPARISON
Pedro Pathing vs RoadRunner
Side-by-side comparison for judges.
ROADRUNNER
- Primarily trajectory-based (preplanned)
- Less reactive under sudden collisions
- Correction depends heavily on perfect conditions
- Less flexible when matches get chaotic
PEDRO PATHING
- Reactive Bézier follower with rapid recalculations
- Stronger real-time correction and tuning control
- More stable autonomous performance
- Better reliability under match stress
VISION
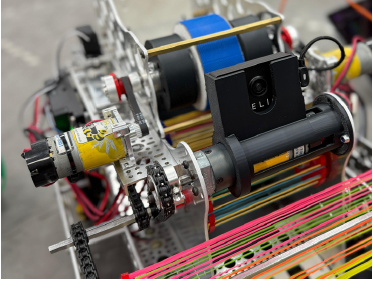
Advanced Auto/TeleOp Programming — Limelight
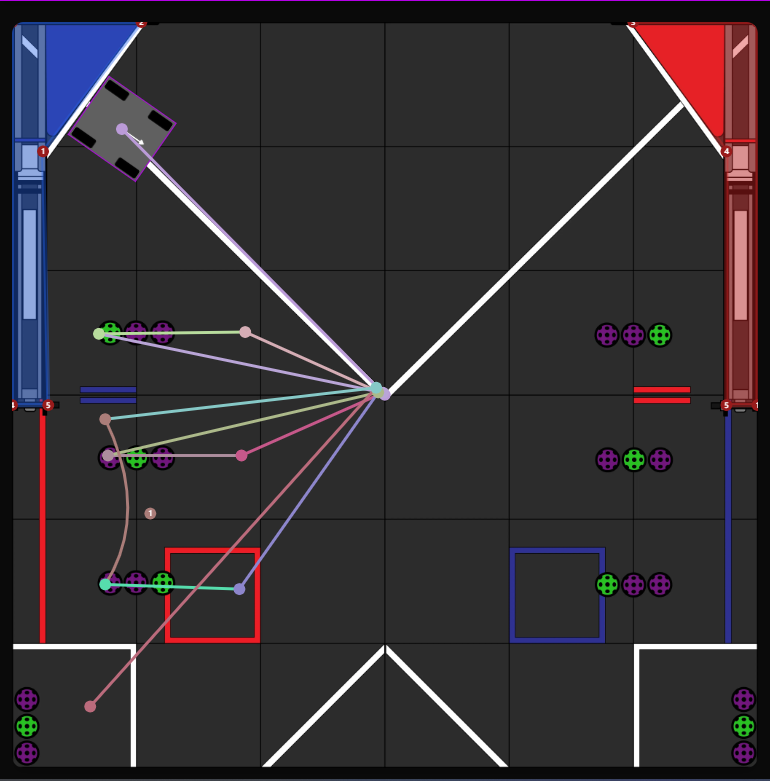
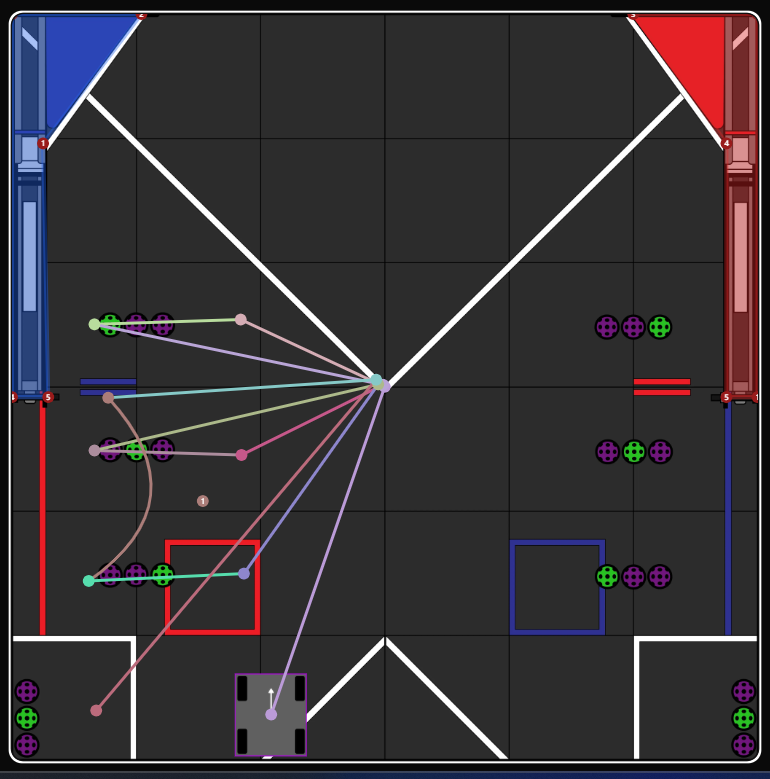
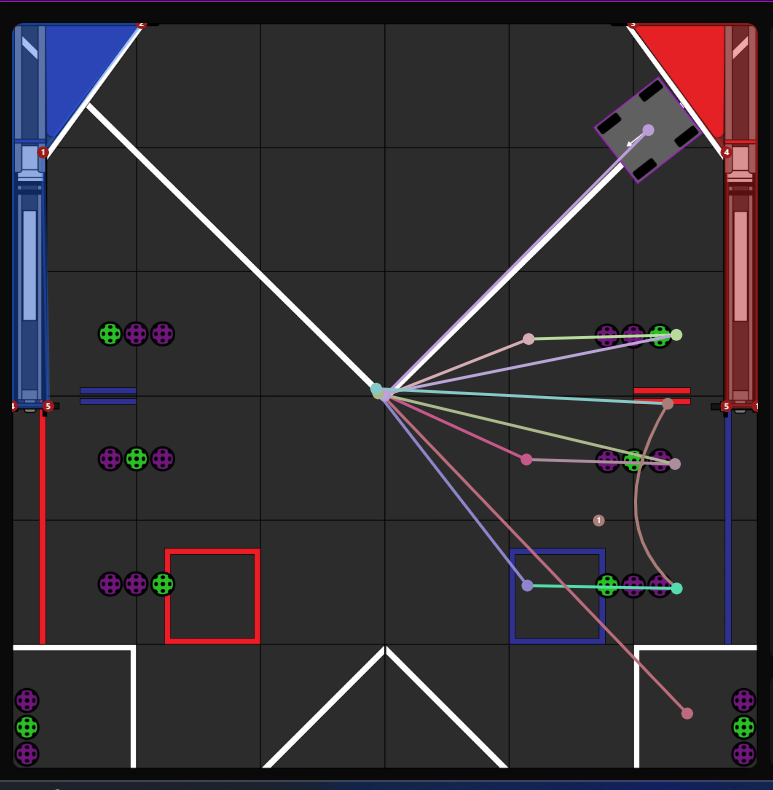
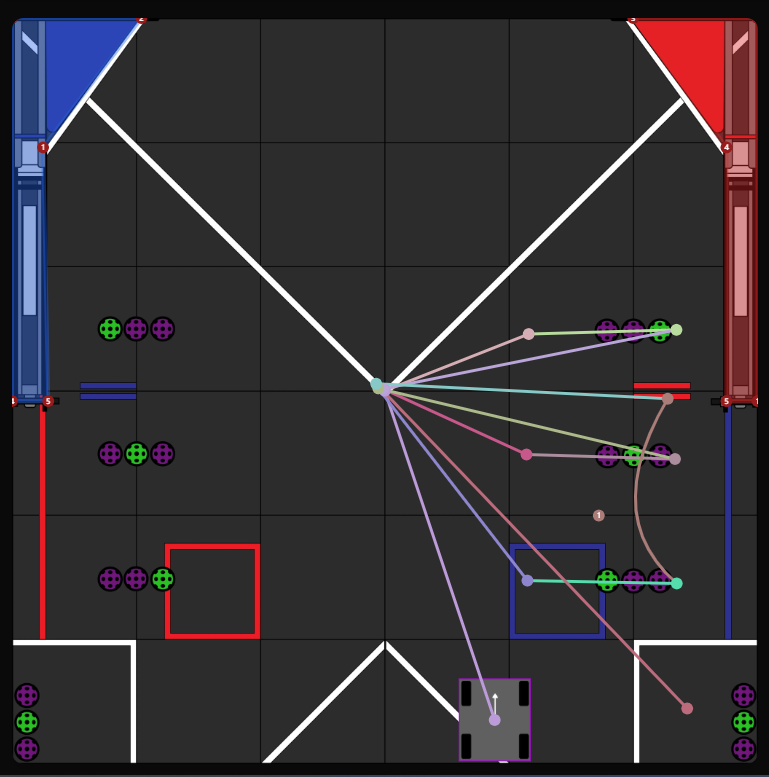
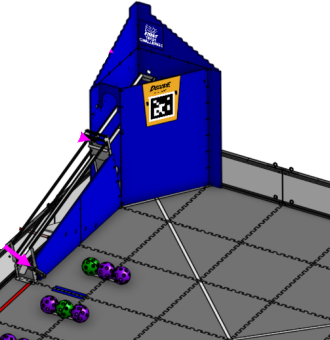
AprilTag detection for alignment and consistency.
We use Limelight 3A for onboard processing. The robot detects AprilTags and aligns itself to the goal post.
This powers self-centering and auto-alignment behaviors.
TeleOp Vision Use
- Self-centering to the goal using AprilTags
- Auto-angling for consistent shooting
- Reduced driver workload under pressure

TELEOP
Advanced TeleOp Programming
Controls
- Gamepad control mapping
- Joystick deadzone removal
- Macro support
Automation
- Auto angling
- Position correction
- Shooter reverse safety
Hybrid Control
- Manual drive + vision assist
- Odometry integration
- Consistent alignment routines
In progress: one-button “Auto-Spot” feature — with a single button press, the robot drives to the optimal
shooting position near the goal (shooting triangle zone).
RECOVERY
Collision Recovery — Position Corrector
Robust autonomous even when the match isn’t perfect.
If the robot is bumped during autonomous, it regains its position by detecting deviation and correcting using
odometry feedback and pathing correction logic.
Why it matters
- More consistent scoring paths
- Less risk of compounding error
- Better match reliability